Autonomní chapadlový robot vytahuje těžké odpadky z mořského dna Marseille

Představte si nadrozměrný drápový stroj v arkádě, ale místo toho, abyste se snažili chytit levné hračky, je vaší cenou sortiment odpadu, který klesá na mořské dno. To je v podstatě to, co nedávno v Marseille dělal autonomní robot.
Přiznejme si, že jsme dost plýtvací druh. A velká část našeho odpadu končí „z dohledu, sejde z mysli“ na zemi nebo na moři. Nezodpovědná likvidace může vést k obrovským problémům s životním prostředím, přičemž operace čištění se pak ukáží jako obtížné a často stojí majlant.
Viděli jsme řadu snah zaměřených na řešení plovoucího odpadu – jako je plastový odpad – na řeky a oceányale co věci, které klesají ke dnu? Projekt SEACLEAR financovaný Evropskou unií si před časem kladl za cíl tyto věci řešit vývojem autonomních robotických úklidových čet.
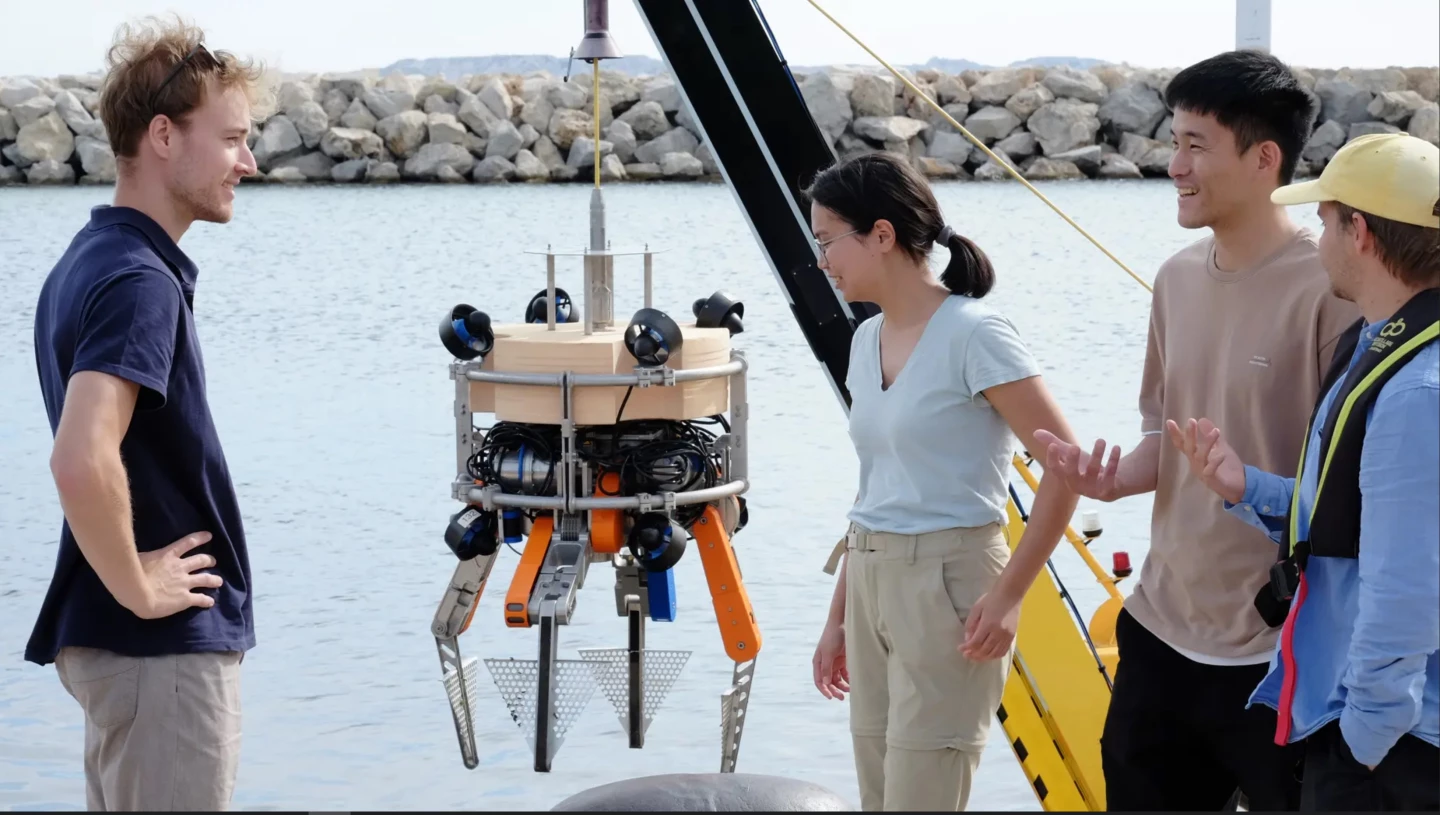
Mezi členy projektu patří Fraunhofer CML, TU Delft, Univerzita v Dubrovníku, Technická univerzita Cluj-Napoca a Technická univerzita v Mnichově. Podvodní chapadlový robot, který je vidět na videu níže, jak vyzvedává odpadky z přístavu Marseille, je dílem týmu posledního partnera projektu.
SEACLAR Catch of the Day v Marseille: Potápěčský robot sbírá odpad
Součástí druhé fáze Vyhledávání, identifikace a sběr mořského odpadu pomocí autonomních robotů V projektu má bot čtyři drápovité chapadla a dokáže uchopit předmět silou 4 000 newtonů, i když nakloní váhu až na 250 kg (550+ lb).
Pokud je vyžadován méně drtivý dotek, palubní senzory „umožňují změřit, jakou sílu může vyvinout, aniž by došlo k poškození. To zabraňuje například rozbití plastových kbelíků nebo rozbití skleněných lahví.“
I když se pod vodou pohybuje vlastní párou (s laskavým svolením osmi vrtulí namontovaných na jeho rámu), všimnete si, že je tento robotický čistič připoután. Kabel poskytuje napájení i přístup k datové síti a zároveň umožňuje vytažení těžkého odpadu z vody a jeho zajištění na palubě podpůrné lodi pro zodpovědnou likvidaci. Tým se rozhodl neinstalovat vestavěnou baterii kvůli omezení provozní doby mezi nabitími.
Andreas Schmitz/TUM
Lokalizace a identifikace odpadků z mořského dna, které je nutné odstranit, se provádí pomocí palubního sonaru a kamerového systému, plus zpracování AI, které robotovi pomůže rozpoznat odpadky a určit, kde je nejlépe popadnout. K dispozici je málo obrazových dat pro identifikaci a klasifikaci podvodních úlomků pro výcvik AI – což může zahrnovat vše od vyřazených rybářských sítí přes stará kola až po staré pneumatiky a autosedačky – takže partneři SEACLEAR přispěli více než 7 000 snímky shromážděnými během různých testovacích fází. Identifikované objekty byly poté převedeny do 3D.
Obecnou myšlenkou je, aby celá operace čištění byla zcela autonomní – s různými partnery pracujícími na různých aspektech projektu. Bezpilotní servisní plavidlo by bylo schopno použít ultrazvukové vlny k vytvoření hrubé mapy mořského dna, přičemž specializovaný vyhledávací robot by pak měl za úkol podrobnější skenování hlubin. Tato data by byla odeslána do chapadla robota, který by pak byl snížen pro povinnosti extrakce objektů. Jako výše uvedené místo sběru vody by mohl sloužit další autonomní člun.
SEACLEAR 2 stále probíhá, ale jednotlivé části se pomalu spojují, což by mohlo vést k tomu, že flotily automatizovaných robotických týmů se v blízké budoucnosti ujmou náročného úkolu uklidit náš nepořádek. Dr. Stefan Sosnowski z TUM má ve videu níže další podrobnosti o chapadla-botovi.
SEACLEAR: Dr. Stefan Sosnowski na potápěčském robotu vyvinutém Technickou univerzitou v Mnichově
Zdroj: TUM